
O zaskakującym połączeniu lotniczego skaningu laserowego, GIS-u i biegu na orientację
Czy sport może mieć coś wspólnego z danymi przestrzennymi? Otóż okazuje się, że może i to całkiem dużo, szczególnie w biegu na orientację. Ta stosunkowo niszowa w Polsce dyscyplina sportu ma z GIS-em przynajmniej jeden wspólny element – mapę. Zadaniem każdego zawodnika jest pokonanie zaznaczonej na mapie trasy w jak najkrótszym czasie, więc jej dokładność i aktualność stanowią podstawę uczciwej rywalizacji. Tutaj właśnie z pomocą przychodzą dane, które przy wykorzystaniu nowoczesnych technologii GIS mogą stanowić podstawę do wykonywania map do biegu na orientację.
Mapa do biegu na orientację
Mapa do biegu na orientację powinna być bardzo dokładna i aktualna. Precyzyjnie odwzorowane muszą zostać przede wszystkim kształty obiektów i ich topologia, gdyż tak naprawdę niemalże każdy szczegół terenowy może stanowić dla szybko biegnącego zawodnika element orientacji. Do prezentacji kartograficznej stosowane są specjalne zestawy symboli, zgodne ze standardami światowymi. Umożliwiają one łatwe odczytanie treści mapy. Wyróżniamy mapy miejskie i leśne. Mapy miejskie, na których rozgrywa się krótkie (2–3 km) biegi sprinterskie, tworzone są w skali 1:4000. Zawierają one bardzo szczegółowe dane o terenie, porównywalne pod kątem treści z mapą zasadniczą. Mapy leśne, z których wykorzystaniem rozgrywa się dłuższe biegi (5–20 km), wykonywane są w skali 1:10 000 lub 1:15 000, co z definicji oznacza dużo większą generalizację. Dalsze rozważania poprowadzimy na przykładzie mapy leśnej, która co do treści zbliżona jest do mapy topograficznej. Wyróżniają ją sposób prezentacji pokrycia terenu oraz oznaczenie charakterystycznych obiektów występujących na terenach leśnych (dołki, kopczyki, wykroty).
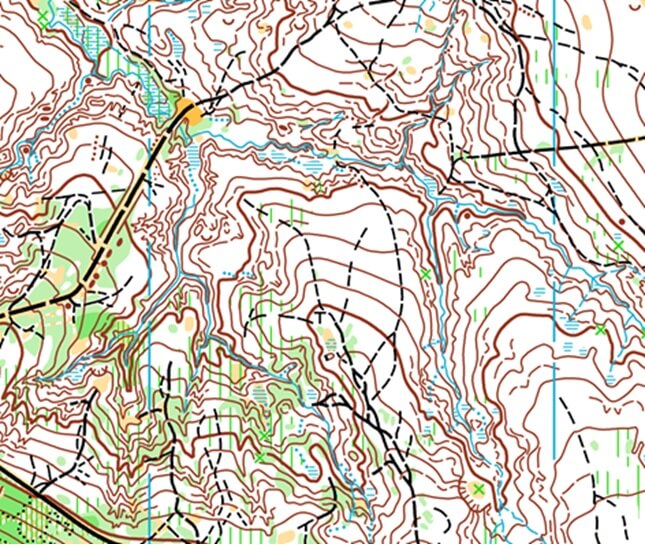
Rys. 1.Fragment mapy do biegu na orientację.
Przebieżność – co to jest?
Bardzo specyficznym parametrem zaznaczanym na mapach jest tzw. przebieżność, która wyraża procentowy wzrost utrudnień w pokonaniu danego fragmentu terenu w jednostce czasu. Prezentuje się ją na mapie za pomocą czterostopniowej skali barwnej, gdzie kolor biały oznacza las bardzo dobrze przebieżny, natomiast trzy odcienie koloru zielonego (od jasno- do ciemnozielonego) oznaczają coraz bardziej utrudnioną przebieżność. Właściwe zinterpretowanie gęstości lasu i naniesienie jej na mapę jest czasochłonne. Jedynym aktualnie wykorzystywanym do tego narzędziem są proste odbiorniki GPS, które w terenie zalesionym dają dokładność rzędu 4–5m, która bywa nie zawsze zadowalająca. Duże nadzieje na automatyzację procesu określania przebieżności lasu wiąże się z pojawieniem się lotniczego skaningu laserowego. Sprawa wygląda na pozornie łatwą, gdyż z chmury punktów LiDAR łatwo można uzyskać informacje o rodzaju pokrycia terenu, wysokości poszczególnych obiektów czy ich gęstości. Rzeczywistość jest jednak znacznie bardziej skomplikowana, ponieważ duży wpływ na interpretowalność danych mają gęstość skanowania oraz pora roku, w której nalot został wykonany.
Analiza zNMPT
Najłatwiejszą metodę pozyskania informacji na temat pokrycia terenu na potrzeby analiz związanych z przebieżnością lasu stanowi wykorzystanie znormalizowanego Numerycznego Modelu Pokrycia Terenu (zNMPT). Jest to model pokrywy terenu odniesiony do poziomu gruntu, który ukazuje względne wysokości pokrycia terenu, w tym przypadku lasu. Można go samodzielnie wygenerować przez odjęcie od siebie rastrów Numerycznego Modelu Pokrycia Terenu (NMPT) oraz Numerycznego Modelu Terenu (NMT), które są wynikiem przetwarzania danych pochodzących z lotniczego skaningu laserowego. W celu wizualizacji pożądanych obiektów wystarczy taki model pokolorować według określonych przedziałów wysokości (rys. 2., część górna). Okazuje się, że odpowiedni dobór przedziałów wysokości na rastrze zNMPT pozwala na precyzyjną wektoryzację granic wielu obiektów bez konieczności wizyty w terenie. Dotyczy to szczególnie granic terenów otwartych i półotwartych, a także miejsc, gdzie występują różnice wysokości pomiędzy poszczególnymi formacjami lasu. Dodatkowo, na przykładzie poniższego rysunku można zauważyć, że w miejscach, gdzie oprócz koloru czerwonego występują plamy koloru zielonego, czyli roślinność o wysokości 2–7m, mamy do czynienia z bogatym podszytem do wysokości 7 m, natomiast w miejscach, gdzie występuje kolor żółty, mamy nieco niższą roślinność – do 2 m. Widać, że nawet taka nieskomplikowana analiza znormalizowanego NMPT pozwala wyciągnąć kilka cennych wniosków przydatnych w procesie tworzenia map do biegu na orientację.
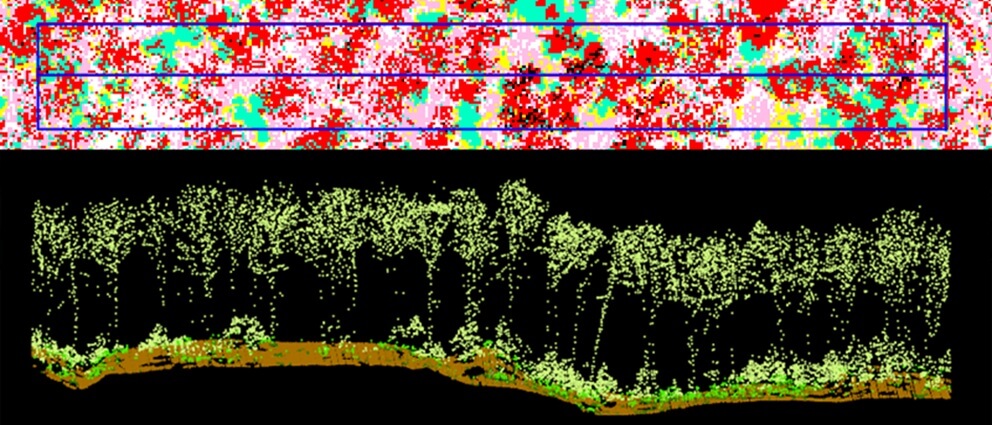
Rys. 2.Widoczność podszytu w wysokim lesie bukowym na podstawie analizy zNMPT.
Badanie struktury pionowej lasu
Bardziej skomplikowany sposób to analiza struktury pionowej lasu z wykorzystaniem danych wektorowych wyekstrahowanych z chmury punktów LiDAR. Jednym z programów, który potrafi pozyskać dane dotyczące położenia pojedynczych drzew oraz zasięgu ich koron, jest amerykański TIFFS (Toolbox for Lidar Data Filtering and Forest Studies). Dostarcza on takich informacji, jak: wysokość drzew, wymiary koron, objętość koron czy wielkość biomasy. Na potrzeby analizy przebieżności lasu można wyekstrahować dane wektorowe dla pojedynczych drzew wraz z informacją dotyczącą rozkładu liczby odbić laserowych dla następujących stref wysokościowych:
– strefa do 3 m – jest to strefa poruszania się zawodnika,
– strefa od 3 do 7 m, w której zawodnik się nie porusza, natomiast gęstość roślinności na tej wysokości może wpływać na widoczność,
– strefa powyżej 7 m, niedostępna dla zawodnika, która nie wpływa na przebieżność i widoczność, ale może decydować o występowaniu terenów otwartych w lesie.
Kolejnym krokiem jest przeniesienie danych do programu ArcGIS i przetworzenie ich do formatu rastrowego do dalszych analiz. Wyznacznikiem gęstości lasu jest liczba odbić laserowych – im więcej odbić laserowych, tym więcej obiektów występuje w lesie, co oznacza, że w tym miejscu las jest gęstszy. W związku z tym odbicia w każdej ze stref wysokościowych należy podzielić na obszary o różnej gęstości (małej, umiarkowanej, dużej) na podstawie kilku testowych fragmentów terenu. Ostatnim etapem jest określenie przebieżności lasu (bardzo utrudniona, utrudniona, dobra) na podstawie gęstości odbić laserowych w danej strefie wysokościowej. Jako efekt opisanej tu analizy tworzy się mapę przebieżności, która po porównaniu z istniejącą mapą do biegu na orientację w wielu miejscach powinna wykazać podobieństwo. Obszary oznaczone na zielono na mapie do biegu na orientację (rys. 3., po prawej) w idealnej sytuacji powinny się pokrywać z odpowiadającymi im obszarami na wygenerowanej mapie przebieżności (rys. 3., po lewej). Jak widzimy, nie jest to rozwiązanie idealne, ponieważ uzyskane wyniki w niektórych przypadkach rozmijają się z rzeczywistością, natomiast na pewno stanowi bardzo dobry punkt wyjścia do dalszych analiz. Być może w przyszłości możliwa będzie całkowita automatyzacja procesu określania przebieżności lasu.
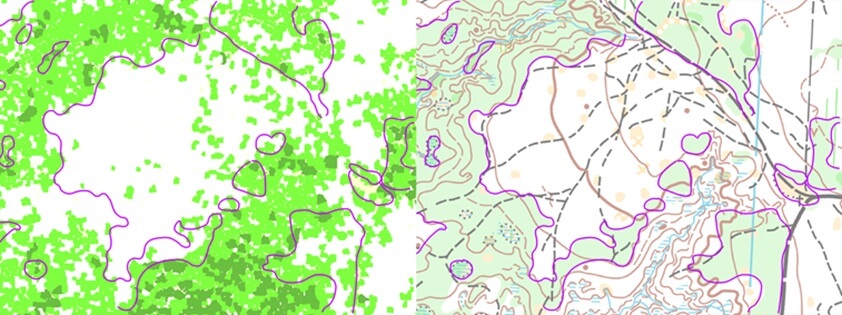
Rys. 3. Fragmenty automatycznie wygenerowanej mapy przebieżności lasu (po lewej) oraz mapy do biegu na orientację (po prawej).
Co więcej?
Pozyskanie informacji na temat przebieżności lasu jest najbardziej skomplikowanym zadaniem w procesie tworzenia map do biegu na orientację. W przyszłości można będzie je zautomatyzować dzięki danym z lotniczego skaningu laserowego oraz technologii GIS. Warto także wspomnieć, że już obecnie wykorzystuje się precyzyjne NMT tworzone na bazie danych LiDAR w celu pozyskiwania informacji o rzeźbie terenu czy przebiegu dróg i cieków wodnych. Potencjał danych skaningu laserowego jest ogromny i jak widać, bywają one wykorzystywane również w dziedzinach mniej znanych zwykłemu człowiekowi.